Руководство по лазерному центрированию и юстировке PhotoRobot
В этом руководстве пользователя содержатся технические инструкции по выравниванию и центрированию встроенных перекрестных лазерных систем PhotoRobot. Выполните следующие действия, чтобы найти середину любой круглой пластины PhotoRobot с помощью двух лазеров. Инструкции включают в себя то, как физически переместить лазеры к центру стола, первоначальные настройки лазера и точную настройку позиционирования лазера. Кроме того, в конце руководства есть инструкция по юстировке и центровке специальной лазерной системы поворотного стола C1300 (ранее распространялась под названием Case 1300).
Важный: Перед самостоятельной установкой или обслуживанием всегда сначала ознакомьтесь с информацией и инструкциями по технике безопасности PhotoRobot в дополнение к руководству, прилагаемому к вашему устройству.
Заметка: Обратитесь к разделу PhotoRobot First Use & Basic Testing для получения подробной информации о конфигурации сети и требованиях к сети.
1. Физически переместите лазеры в центр стола
1.1. Прежде чем начать, установите соединение между PhotoRobot и локальной сетью. Далее включаем блок управления (6-го поколения) и лазер-бокс.
Заметка: Чтобы выровнять и отцентрировать лазерную систему для поворотного стола C1300, обратитесь также к специальным инструкциям в разделе 4 данного руководства пользователя.
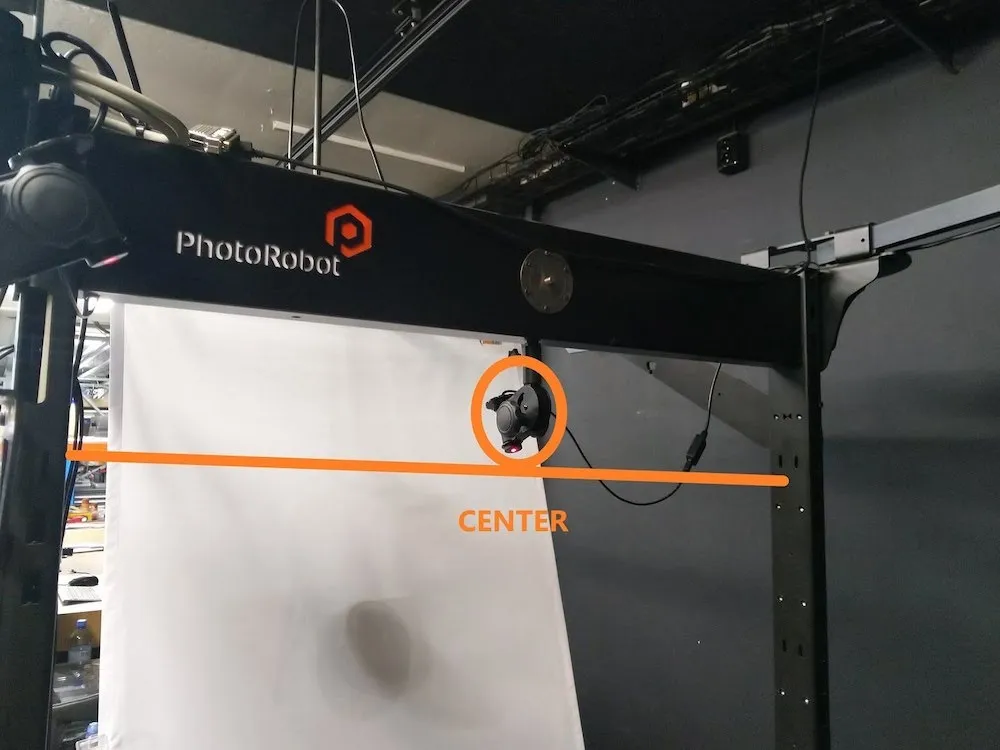
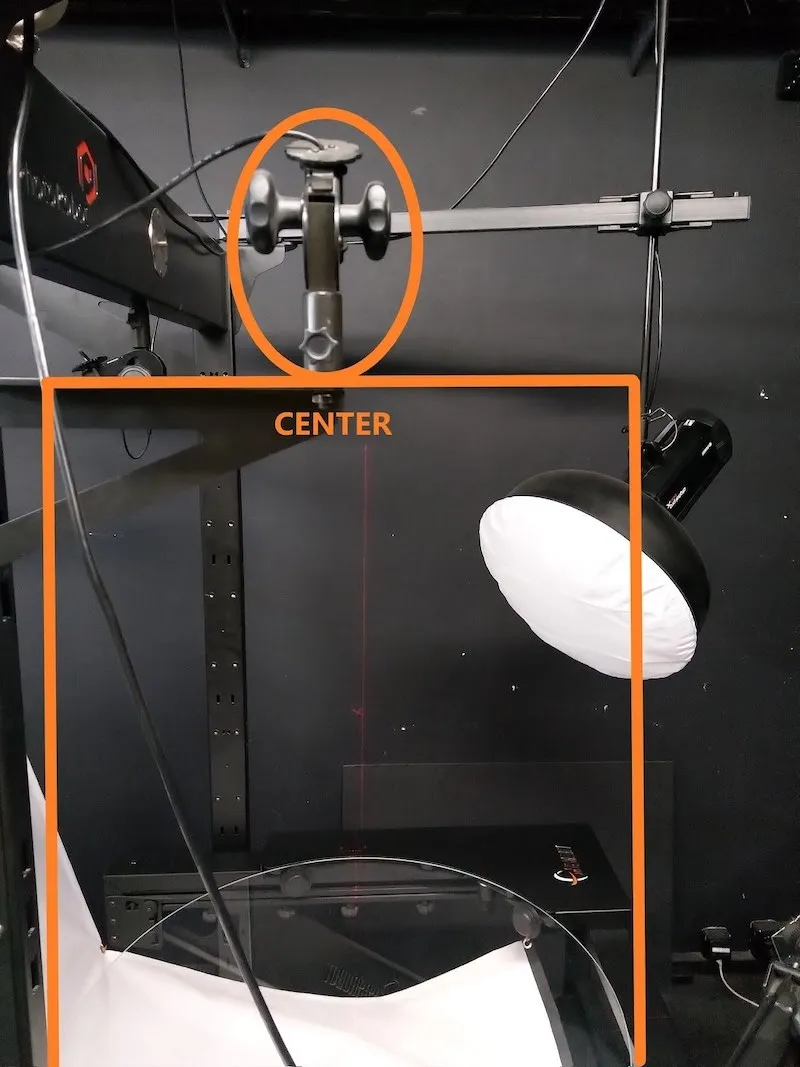
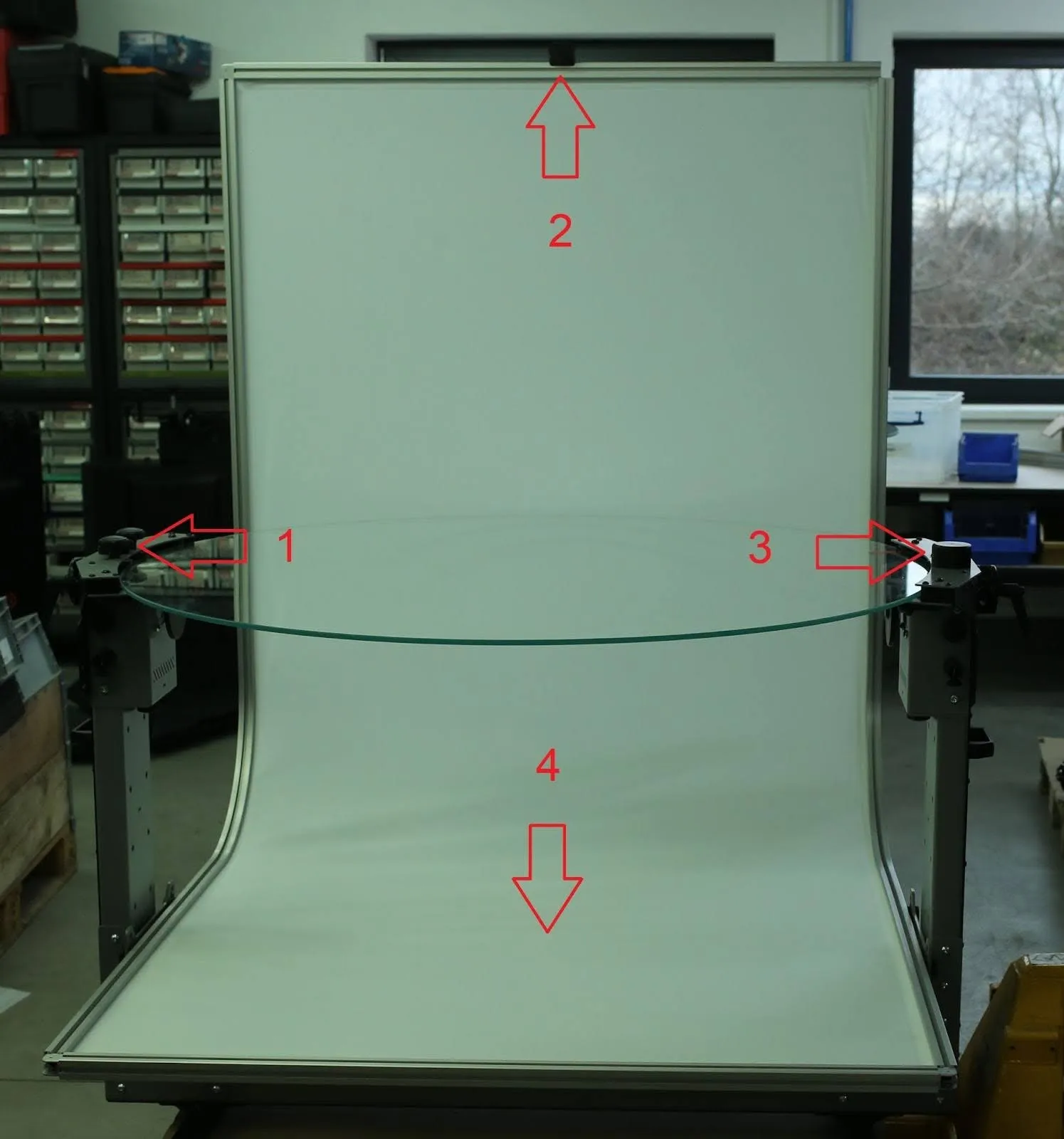
1.2. После подключения PhotoRobot к сети и включения блока управления и лазерного бокса измерьте расстояние между обеими сторонами стола, на котором установлен лазер. Затем поверните или переместите лазер рукой к центру и закрепите лазер в нужном положении.
2. Оцените приблизительные настройки
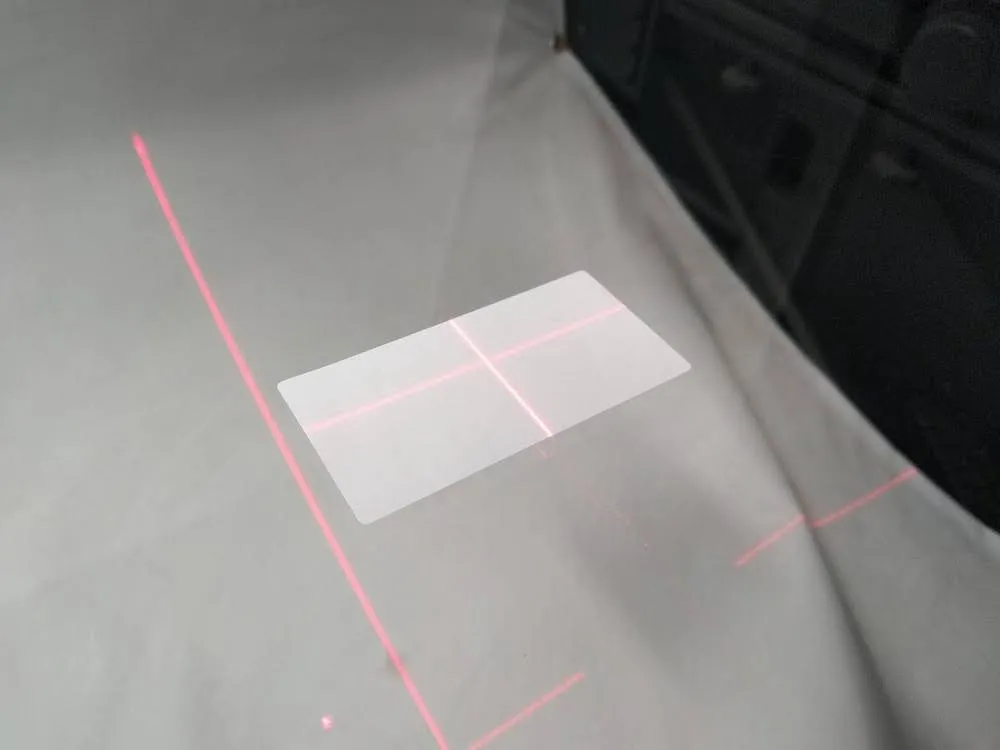
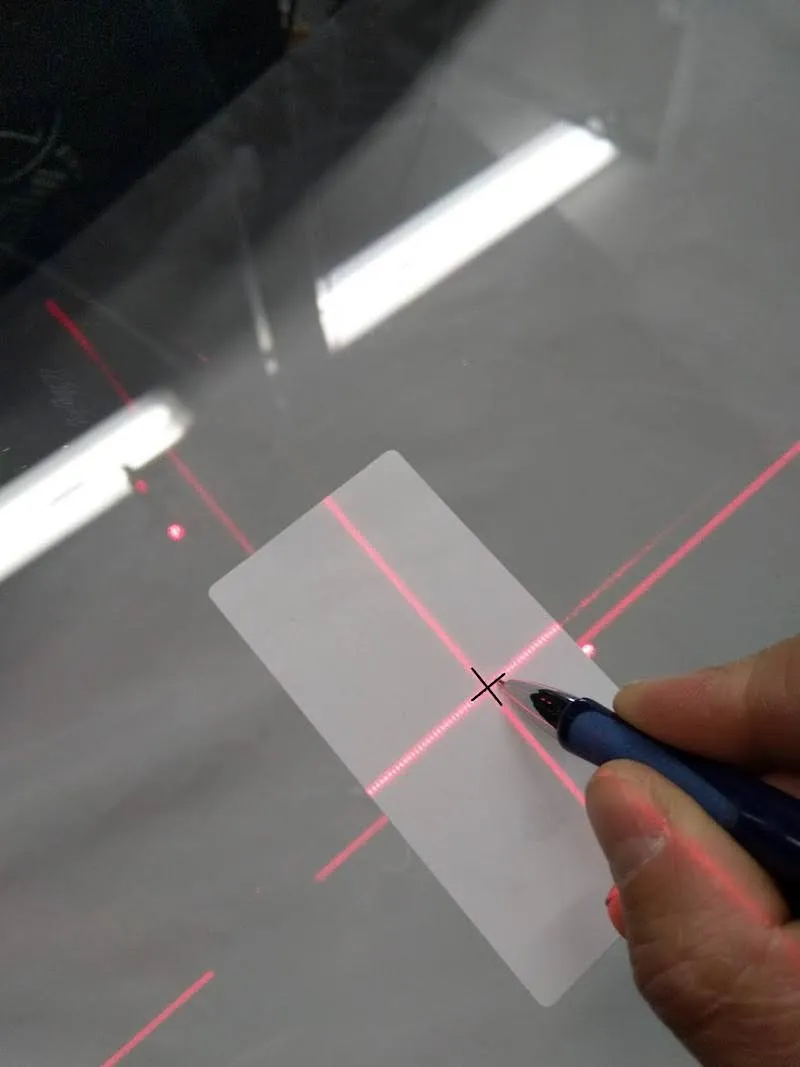
2.1. Когда лазер будет закреплен на месте, поместите наклейку на пластину поворотного стола примерно в средней точке стекла. Лазеры станут более заметными на наклейке, что поможет лучше оценить центральную точку пластины.
2.2. Отрегулируйте оба лазера вручную, чтобы они совпали по наклейке, которая оценивает приблизительную среднюю точку.
3. Тонкая настройка лазерной юстировки
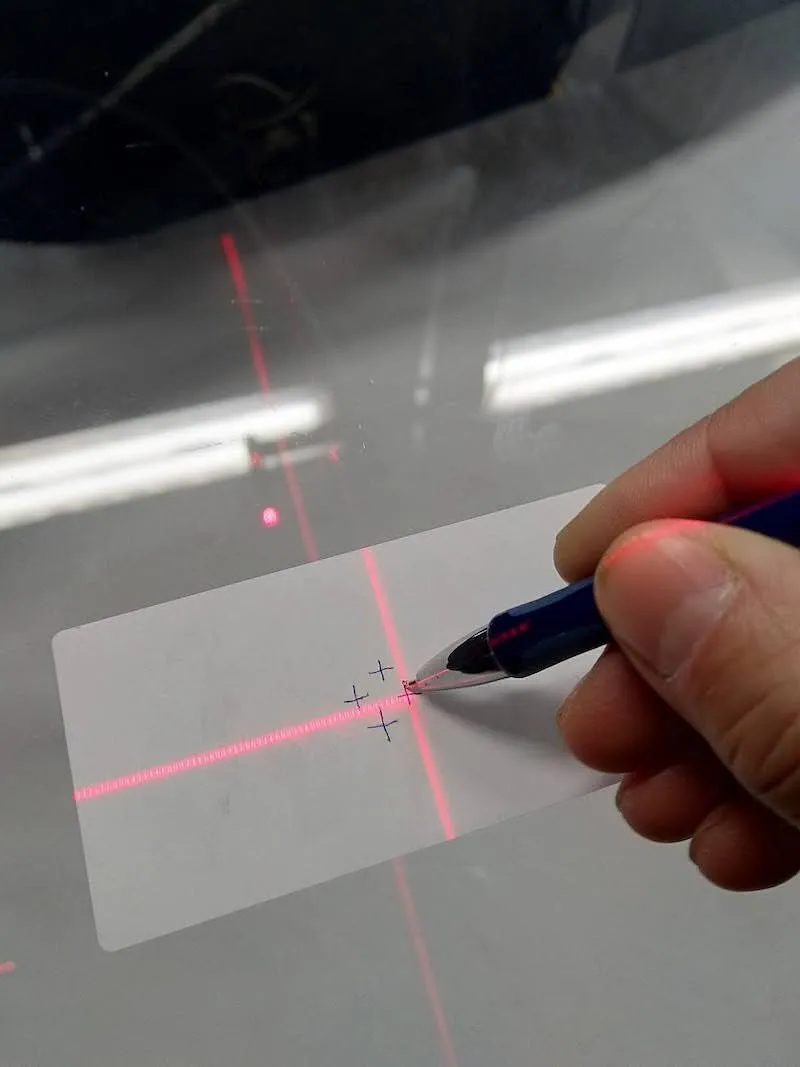
3.1. Нарисуйте на наклейке маленький крестик, копирующий красный крест лазеров.
3.2. Далее запустите приложение Locator на своем мобильном телефоне, найдите назначенный роботу блок управления и получите доступ к графическому интерфейсу службы. Заметка: Подробные инструкции по работе с сетью см. в разделе PhotoRobot Detailed Networking Prerequisites (раздел 8: Информация о приложении). Затем найдите блок управления, назначенный роботу, и получите доступ к его графическому интерфейсу.

3.3. В графическом интерфейсе сервиса с помощью элементов управления поворотом поверните стекло на 90 градусов, и снова проведите трассировку положения перекрестных лазеров на наклейке. Повторите этот шаг дважды: поверните стекло на 90 градусов, проведите по лазерному кресту, поверните на 90 градусов и проведите по лазерному кресту в последний раз.
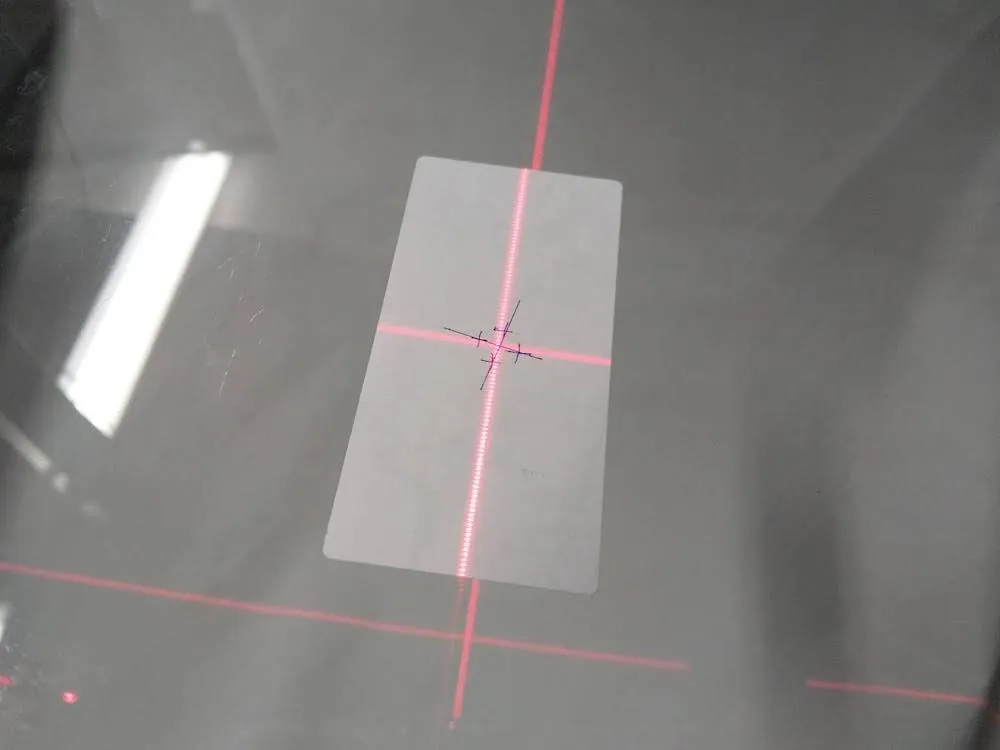
3.4. Начертив четыре крестика на наклейке, соедините каждый противоположный крест прямыми линиями. Полученное пересечение между отдельными крестами будет представлять собой фактическую середину стеклянной пластины.
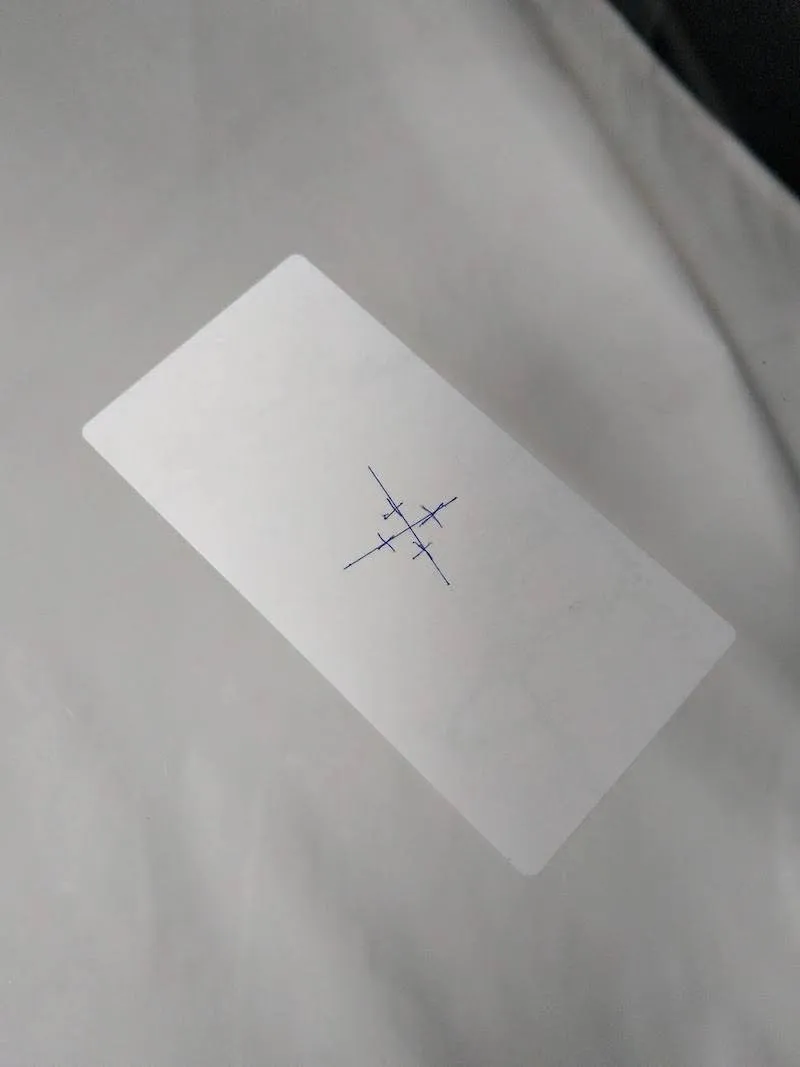
3.5. Наконец, настройте оба лазера на идентифицированную среднюю точку. Теперь лазерная система будет центрирована и выровнена по абсолютному центру вращения пластины.
4. C1300 Специализированные лазеры для юстировки и центровки
4.1. При юстировке и центрировании лазеров на роботе C1300 обратите внимание на специальную лазерную систему. Лазерная система C1300 имеет несколько отличий по сравнению с другими PhotoRobot. Несмотря на то, что физические принципы одинаковы, конструкция лазерной системы C1300 включает в себя установку из четырех лазеров.
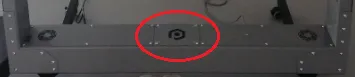
4.2. В данной системе Laser 4 является неотъемлемой частью скелета робота C1300. Лазер 4 представляет собой перекрестный лазер, и он светит через белый фон с нижней стороны. Чтобы отрегулировать положение лазера, найдите четыре серебряных винта, чтобы открыть центральную квадратную часть, в которой находится лазер.
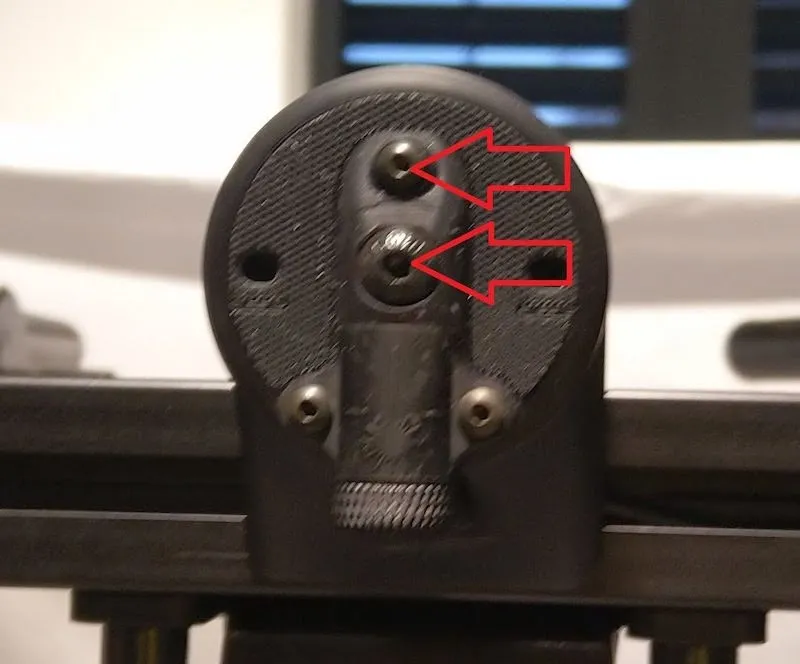
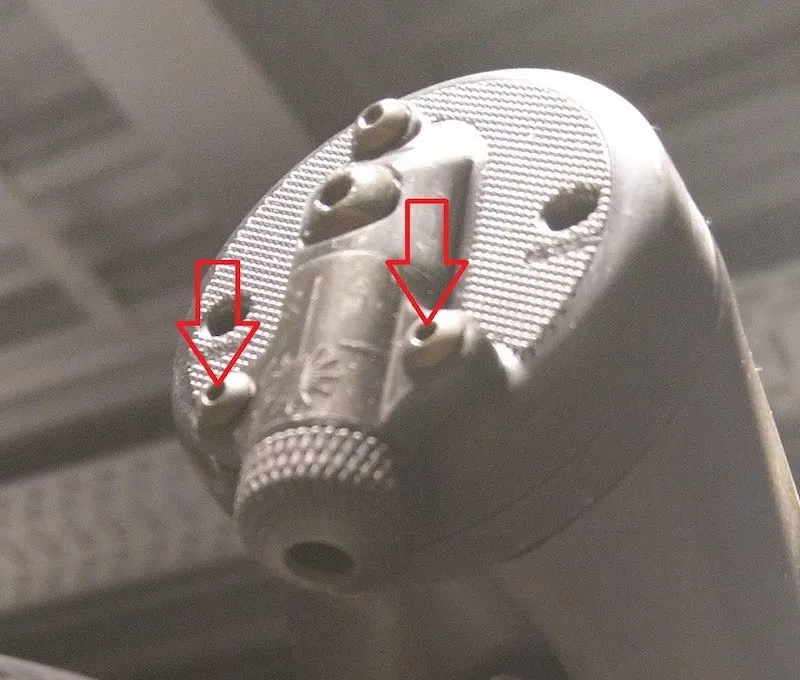
4.3. После раскрытия центральной квадратной части корпуса Laser 4 с помощью двух винтов, удерживающих пластиковый корпус лазера, вручную отрегулируйте его положение.
Заметка: Лазер 1, Лазер 2 и Лазер 3 имеют ту же конструкцию, что и Лазер 4. Они также все являются линейными лазерами:



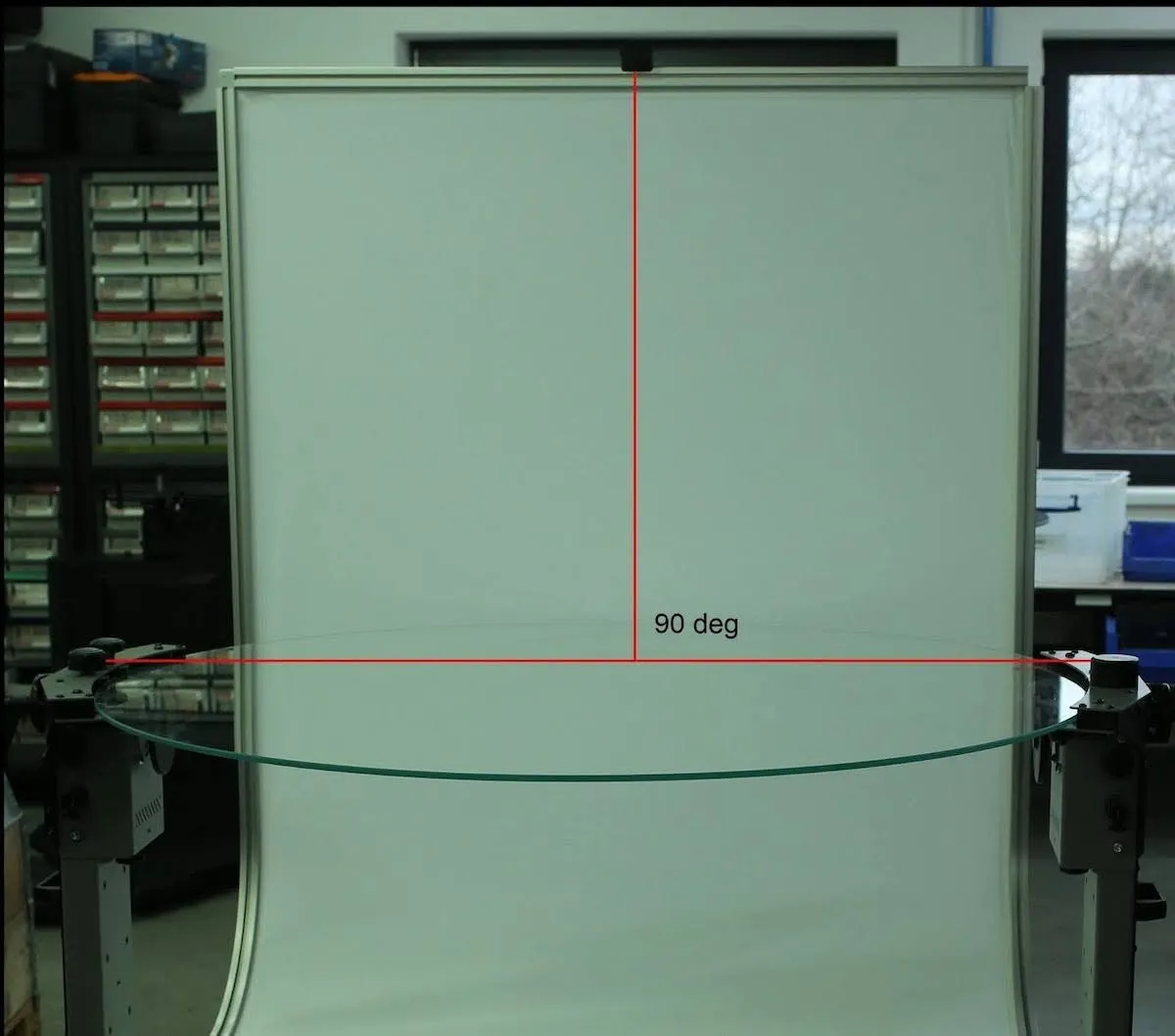
4.4. Наконец , при юстировке и центрировании лазеров убедитесь, что между лазерной линией от верхнего лазера и стеклянной пластиной находится угол 90 градусов.


Серия EOS Rebel


Серия цифровых зеркальных камер EOS


Серия беззеркальных камер EOS M


Серия PowerShot


Крупный план / Съемка с рук

Серия Canon EOS Rebel — это удобные для начинающих цифровые зеркальные камеры с хорошим качеством изображения, интуитивно понятным управлением и универсальными функциями. Эти камеры идеально подходят для любителей фотографии, обеспечивают надежную автофокусировку, сенсорные экраны с регулируемым углом наклона и запись видео в формате Full HD или 4K.
Связь
Разрешение (MP)
Резолюция
Цифровые зеркальные камеры Canon EOS серии обеспечивают высокое качество изображения, быструю автофокусировку и универсальность, что делает их идеальными для фото- и видеопроизводства.
Связь
Разрешение (MP)
Резолюция
Беззеркальные камеры Canon EOS M сочетают в себе компактный дизайн и производительность, сравнимую с цифровыми зеркальными камерами. Благодаря сменным объективам, быстрой автофокусировке и высококачественным датчикам изображения эти камеры отлично подходят для путешественников и создателей контента, которым нужна портативность без ущерба для качества изображения.
Связь
Разрешение (MP)
Резолюция
Серия Canon PowerShot — это компактные и удобные камеры для обычных фотографов и любителей. Модели, варьирующиеся от простых мыльниц до продвинутых камер с зумом, обеспечивают удобство, стабильное качество изображения и такие функции, как стабилизация изображения и видео 4K.
Связь
Разрешение (MP)
Резолюция
Камеры Canon для съемки крупным планом и ручные камеры предназначены для детальной фото- и видеосъемки крупным планом. Компактные и простые в использовании, они обеспечивают точную фокусировку, изображение с высоким разрешением и универсальные возможности макросъемки, что идеально подходит для видеоблогов, фотосъемки продуктов и творческих крупных планов.
Связь
Разрешение (MP)
Резолюция


